教育在线
教育在线



近年来,“软体机器人”的研究正迅速成为学术界一个备受关注的热点领域。软体机器人(Soft Robotics)是一种全新的机械系统,在多种领域中具有极大的应用前景。近日,西北工业大学张军诗教授联合西安交通大学、西安理工大学、清华大学以及香港城市大学的研究人员,设计制造了一种可以主动变形的软体机械臂,其可以在狭窄而受限的环境中导航,并且具备刚度可调、震颤过滤和运动缩放等功能以确保在操作过程中机械臂的位置和姿势。通过基于手柄的遥控操作展示了在复杂的环境中导航的能力,相关工作以“Fiber-reinforced soft polymeric manipulator with smart motion scaling and stiffness tunability”为题发表在Cell旗下物质科学子刊《Cell Reports Physical Science》(Cell Rep. Phys. Sci., 2021, 2, 100600)。Cell Reports Physical Science是Cell Press新晋高水平物质科学期刊,旨在报道物质科学领域的前沿研究成果,涵盖化学、物理、材料科学、能源科学、工程以及相关跨学科领域。
该软体机械臂由驱动单元和刚度调节单元组成,对于驱动单元而言,其弯曲角度与输出力是最为重要的两个性能要素,故通过连续加压测量每个驱动单元的极限压力。由于机械臂单元有三个气室,故采用极限压力的平均值。在单腔和双腔驱动条件下测量,并使用校准的相机来捕获弯曲过程,在图像处理后获得机械臂单元的弯曲角度。此外,优化后的软体机械臂可提升超过自身4倍的重物,展示了其强大的对外做功能力。通过研究发现,变刚度外套在不同负压条件下可提供不同的抗弯刚度,故可通过不同的刚度条件实现软体机械臂的变形比例缩放,进一步可以实现对于人手失误所引起的震颤的消除。
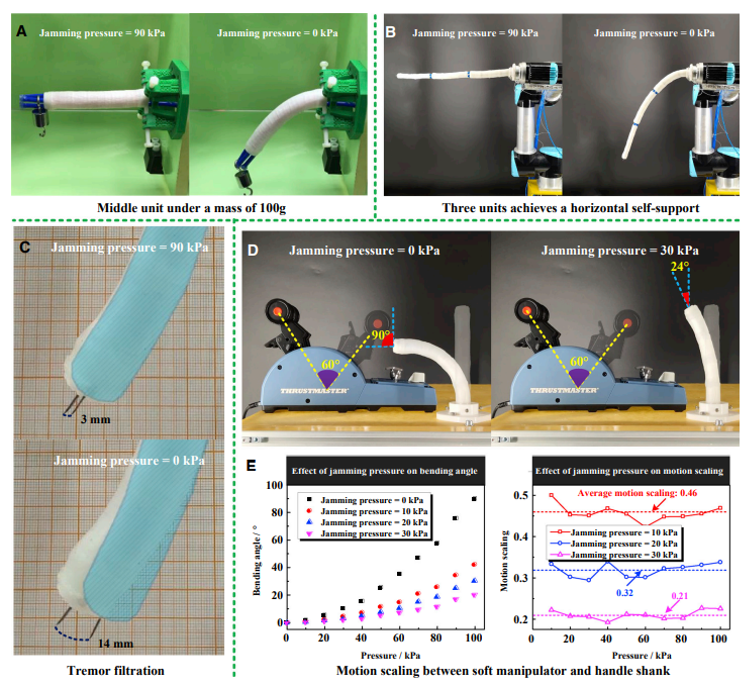
图1 刚度调节性和运动缩放展示
由于软体机械臂具有连续变形和无限自由度的理想特性,因此需要定量确定在工作过程中的安全性,根据D-H坐标方法建立相应的的运动学模型,对软体机械臂的位姿进行了预测并与实际比较,发现与实际情况相当一致。通过激光跟踪器ION(FARO)记录软体机械臂末端工作空间,其最大操作空间可以认为是一个由六条曲线裹的近似半椭圆体。此外,又进一步深入研究了软体机械臂的操作准确性。通过在末端安装笔头,遥控软体机械臂以寻找并蘸取墨水,然后寻找和标记具有不同直径的预先绘制的目标圆圈,当目标圆直径在3cm左右时,操作精度可控制在100%。
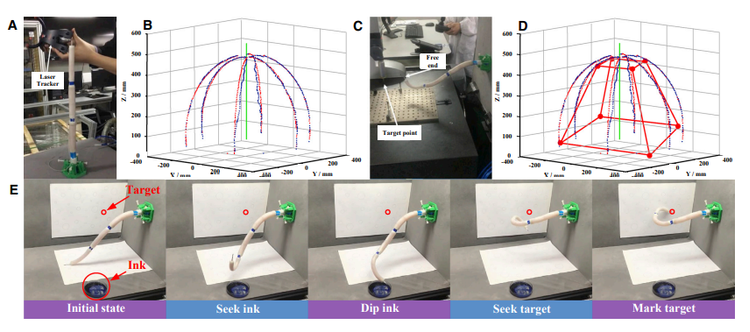
图2 软体机械臂操作精度展示
基于软体机械臂的大变形能力,使用遥控手柄对软体机械臂进行操控可完成其在人体骨骼狭小空间内的介入。然后,将软体机械臂固定在基板上,并将预先标记病变部位的人体模型水平放置,结合手柄控制并协同软体机械臂的整体进给运动,实现了其在人体喉部自然腔道内的无损介入,并完成了穿刺及送药展示。
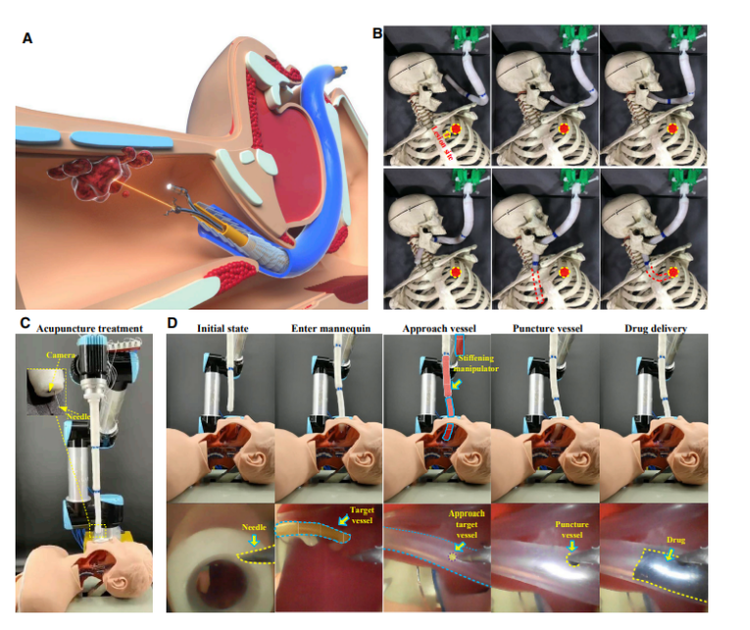
图3 腔体内遥控导航及体内送药展示
为了快速实现软体机械臂的介入操作,研究人员同时开发了人体器官的识别和跟踪系统,确保软体机械臂可准确识别目标器官并及时跟踪其位置。以人体嘴部为例,人体器官识别系统可准确捕捉人体脸部和嘴部的位置,无论头部是处于旋转状态还是平行平移状态。在此基础上,研究人员开发了人体器官实时跟踪系统,可以自动实时跟踪和定位处于移动状态的人体器官。自动化的识别和跟踪系统可以在很大程度上释放操作人员的手部操作负担。该研究工作有望拓展软体机器人在医工交叉领域的应用前景。
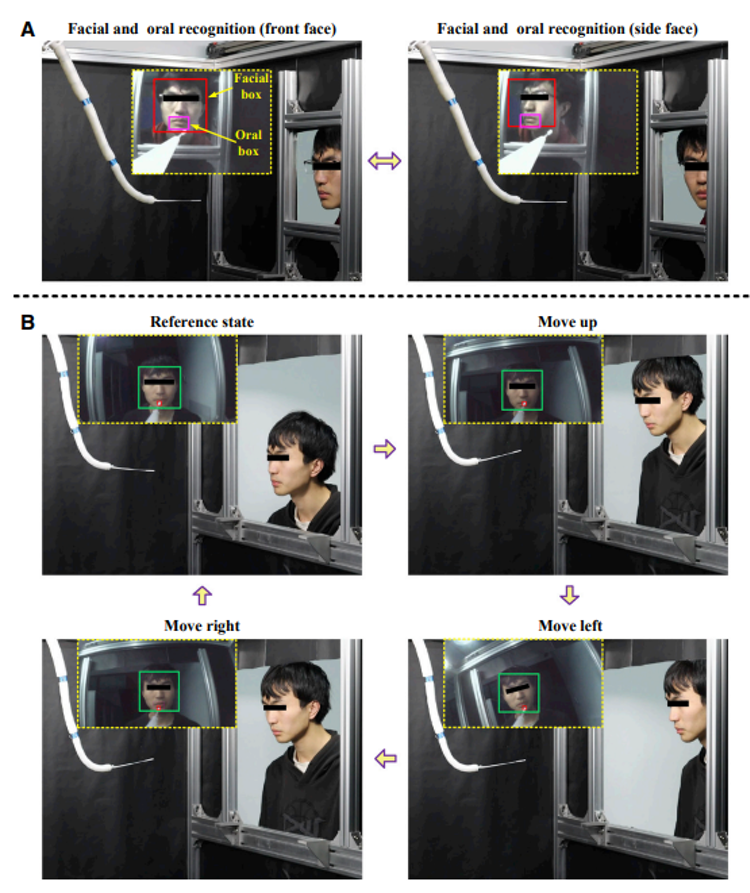
图4 识别追踪系统
① 凡本站注明“稿件来源:教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。