中国教育在线
中国教育在线



2019年7月至2020年7月,深圳大学机电与控制工程学院曹广忠教授、黄苏丹助理教授团队在国际电子电气工程领域顶级期刊IEEE Transactions on Industrial Electronics就平面电机技术研究连续发表5篇系列研究论文,该期刊是中科院JCR工程技术大类一区TOP期刊,2020年影响因子为7.515。曹广忠教授、黄苏丹助理教授分别为论文的通讯作者或第一作者,深圳大学均为第一完成单位。
平面电机是高端装备光刻机中核心精密工件台的关键技术,是我国集成电路芯片制造领域的卡脖子技术。平面电机分为微动平面电机和宏动平面电机,前者用于实现毫米级短行程、纳米级超高精度的二维运动,后者用于实现毫米级以上大行程、亚微米级高精度的二维运动。宏动平面电机要求具有结构简单、精度高、行程大、响应速度快、可靠性高等突出特点,是平面电机技术发展的主要方向。
团队近年致力于宏动平面电机技术研究,创立了平面电机的无位置传感器位置精准辨识、控制以及高精度轨迹跟踪运动的系统新理论与技术,为诸如高端半导体IC制造领域的核心精密工件台所需要的宏动平面驱动关键技术提供了新途径和解决方案,具有重要的理论价值和应用前景。
论文1
// 标题:An assistant-mover-based position estimation method for planar switched reluctance motors
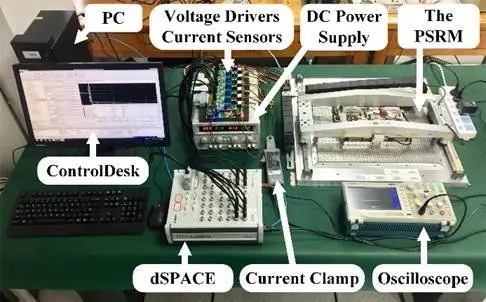
针对平面开关磁阻电机的强非线性磁链特性、难以动态测量内部磁感应强度和准确测量动子线圈电感和磁链问题,在国际上首次提出附加动子块的概念,创新性地提出了基于附加动子块的无位置传感器动子位置辨识与控制理论与方法,实现了全速范围的电机无位置传感器闭环伺服精确控制。
*原文链接
https://ieeexplore.ieee.org/document/8863116

基于附加动子块的平面开关磁阻电机
无位置传感器动子位置检测与控制系统
论文2
// 标题:Sensorless control of planar switched reluctance motors based on voltage injection combined with core-loss calculation
针对难以建立平面开关磁阻电机相电感与位置间高精度映射关系以及相磁链受电机损耗影响产生畸变的问题,提出了基于电压注入与铁芯损耗计算的平面开关磁阻电机无位置传感器控制理论与方法,揭示了铁芯损耗与动子位置的内在参数耦合关系与动子位置关联规律,实现了铁损下电压注入式无位置传感器的电机闭环精准控制。
*原文链接
https://ieeexplore.ieee.org/document/8870256
基于电压注入与铁芯损耗计算的
平面开关磁阻电机无位置传感器控制系统
论文3
// 标题:Predictive position control of long-stroke planar motors for high-precision positioning applications
针对宏动平面电机的强非线性、高不确定性、运动耦合等导致其高精度轨迹跟踪困难,在国际上首次将模型预测控制理论引入平面电机控制领域,提出了宏动平面电机的高精度预测轨迹跟踪控制方法,设计了多步模型预测位置控制器,探讨了宏动平面电机多步模型预测位置控制系统的控制特性,实现了电机微米级的大行程轨迹跟踪控制。
*原文链接
https://ieeexplore.ieee.org/document/9057537

宏动平面电机的模型预测轨迹跟踪控制系统结构
论文4
//标题:Predictive position control of planar motors using trajectory gradient soft constraint with attenuation coefficients in the weighting matrix
进一步提出了具有轨迹梯度软约束的宏动平面电机预测跟踪控制理论与方法,研发了具有衰减系数加权矩阵的电机模型预测跟踪控制器,系统地探讨了宏动平面电机的电机参数、模型预测轨迹跟踪控制算法及其高精度轨迹跟踪控制性能的关联关系,显著提升了电机控制的动态性能、稳态性能和鲁棒性。
*原文链接
https://ieeexplore.ieee.org/document/9130961

具有轨迹梯度软约束的
宏动平面电机预测位置控制实验系统结构
论文5
// 标题:Input-constrained-nonlinear-dynamic-model-based predictive position control of planar motors
针对线性动态模型建模不准确以及模型预测控制在线求解约束优化计算量大的问题,提出了宏动平面电机的约束非线性动态建模及其预测轨迹跟踪控制理论与方法,考虑电机参数变化、非线性、运动耦合、外部扰动、执行器饱和等多因素,建立了新的系统非线性动态模型,设计了非线性模型预测轨迹跟踪控制器,获得了约束模型预测控制在线求解计算量小的显式解析解,实现了宏动平面电机的高精度运动控制。
*原文链接
https://ieeexplore.ieee.org/document/9145788

线性和非线性动态模型下的
宏动平面电机的模型预测轨迹跟踪运动结果
研究得到了国家自然科学基金面上项目(51677120、51275312)、国家自然科学基金重点项目(U1813212)、国家自然科学基金青年项目(51907128)等支持。
关于IEEE
电气和电子工程师协会(IEEE,全称是Institute of Electrical and Electronics Engineers)是一个美国的电子技术与信息科学工程师的协会,是世界上最大的非营利性专业技术学会,致力于电气、电子、计算机工程和与科学有关的领域的开发和研究。IEEE出版有70多种期刊杂志,每个专业分会都有自己的刊物。据称该组织每年发表的论文著作数量占全世界该领域当年发表量的30%。
① 凡本站注明“稿件来源:中国教育在线”的所有文字、图片和音视频稿件,版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:中国教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及版权等问题,请作者在两周内速来电或来函联系。